







What is a Point Cloud Survey?

posted 25th June 2024

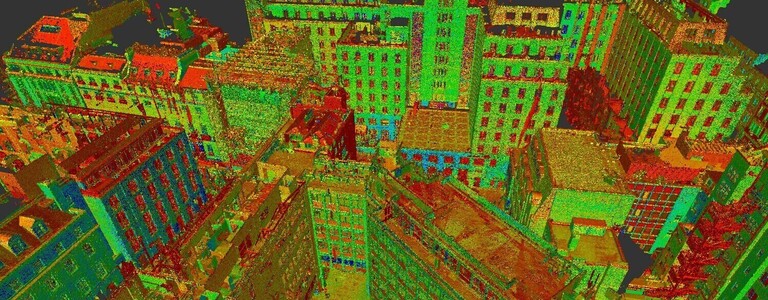
Point cloud surveys are 3D scans of a building using a set of data points combined together to provide accurate survey data. The data points are collected using a laser scanner, capturing information in three-dimension.
The scanner beams a laser is all directions, once it hits an object or surface it bounces the laser back to the sensor on the scanner. These points of information are then used to calculate size, distance, and shape of the object or surface, creating a point cloud survey data set. These scanners have the ability to capture millions of data points in a second, providing fast and accurate 3D survey.
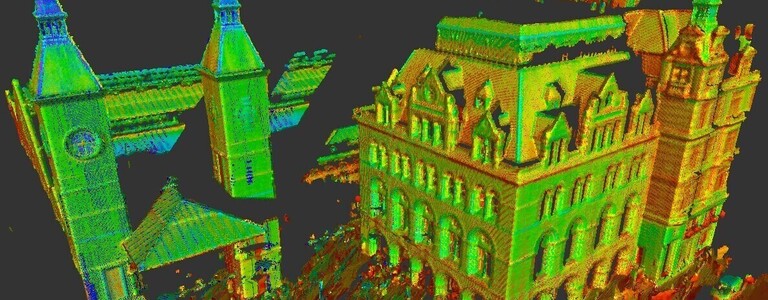
Based on the surface or structure being surveyed, the surveyor often moves the scanner around, capturing every element of the space. With every angle captured, you get an accurate 3D model with the smallest details.
Benefits of Point Cloud Surveys
Thanks to advancements in technology, point cloud surveys provide accurate information with up to two millimetre accuracy. They are flexible options with the scanners being lightweight and easy to move around any building site. Other benefits include:
- Accurate data provided by the scanner enables you to make fast and effective decisions regarding your build
- These scanners are quick, cost-effective, and precise
- Faster project turnaround
- Reduce the need for numerous inspections
- Reduce the risk of errors
- Data sets can be extracted into 3D models, CAD outputs, and more
What are Point Cloud Surveys Used For?
Point cloud surveys are valuable when working on any construction site, whether it's building a large shopping mall, a new home, or extending your existing property. They are used in the architectural and construction industries and have become the common go-to for surveyors, due to the excellent benefits they provide.
Point cloud surveys are used to provide accurate data before and after the construction is completed. Originally, these point cloud surveys were only used to analyse different terrains. Today, they are used in a variety of construction projects, providing useful information for architects, engineers, buildings, electricians, plumbers, and more.
Point Cloud Scanner Types
There is more than one point cloud scanner on the market, each one offering its own advantages and disadvantages. Terrestrial scanners are the most popular, using a tripod, they are fixed in one spot on the ground during the scan and then moved to another spot to capture all angles of the structure or space. Due to the fact that they are set on even ground, using a tripod, they capture accurate data without any movement. They have an excellent range of a few hundred metres with outstanding precision, capturing every important detail of the land or structure.
Viewing Point Cloud Data
Point cloud data doesn't make sense before it is uploaded using a specific software programme. It comprises of data sets that include x, y, and z coordinates, colour codes, and brightness. This is all determined by the scanner used.
There is a number of different software programmes used to view the data. Larger and complex projects may need a powerful computer to view the point cloud data provided. They can be provided in a number of different file formats.
Once processed, the point cloud survey data is processed into a 3D model or a 2D file, which is what the client receives. The data is cleaned to include relevant data regarding the building site. Most surveyors use CAD programmes, providing a file that is easily available for their clients.
The file types provided can include:
- 2D architectural drawings
- 3D models
- RCS or RVP files
Conclusion
Point cloud surveys have become the most popular way to survey a piece of land or existing structure. It removes the risk of human error and is considerably faster than traditional methods. Surveyors can use the equipment with ease, as the scanners are lightweight and easily portable, making them ideal for all building projects.